根据《中华人民共和国促进科技成果转化法》等国家法律法规,现将如下科技成果转让进行公示。公示期15天,自2022年5月13日至2022年5月27日。如有任何异议,请于公示期内向科研院实名反映。
联系方式:025-84892757
1.技术秘密名称:一种基于注意力机制引导的大规模跨尺度测量点云数据去噪技术
技术秘密简介:
研发起始时间:研发开始时间为2019年6月10日,完成时间为2019年9月10日。
创新点:①注意力机制引导 ②大规模跨尺度测量点云数据去噪
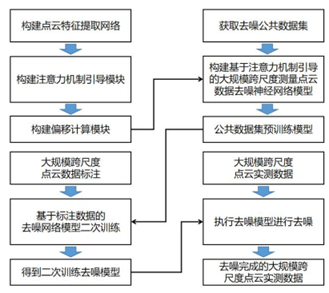
主要功能及作用、步骤:该专有技术的主要功能为对采集到的点云数据进行去噪处理,作用是使得优化采集到的点云数据质量,方便后续对测量点云数据进行分析计算。首先构建点云特征提取网络,再进一步构建注意力机制引导模块,最后构建偏移计算模块。三个模块共同构成基于注意力机制引导的大规模跨尺度测量点云数据去噪神经网络。在预训练阶段,收集去噪公共数据集进行预训练,得到使用公共数据集预训练的模型。基于预训练模型,标注少量的大规模跨尺度点云去噪数据集,进行二次去噪模型的训练。在得到二次去噪模型后,即可对大规模跨尺度点云实测数据执行去噪操作,最终完成大规模跨尺度点云实测数据的去噪,流程图如下所示:
源代码程序行数:约9800 行。
2.技术秘密名称:一种基于层次深度特征优化引导的三维点云下采样技术
技术秘密简介:
研发起始时间:研发开始时间为2020年08月06日,完成时间2020年11月10日。
创新点:①层次深度特征优化引导 ②三维点云下采样技术
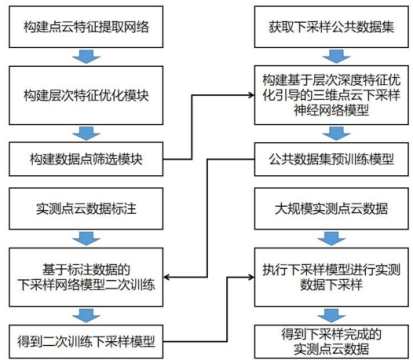
主要功能及作用、步骤:该专有技术的主要功能为对采集到的点云数据进行下采样,作用是对庞大的原始数据进行减量操作并尽可能保持原始的数据特征,使得算法能够对大规模的测量点云数据进行快速分析与计算。首先构建点云特征提取网络提取测量数据的不同层次特征,再基于特征提取网络,结合不同层次的特征对数据点进行偏移计算,得到不同数据点的权重信息。基于上述权重信息,构建数据点筛选模块。获取下采样公共数据集训练基于层次深度特征优化引导的三维点云下采样神经网络模型,完成网络模型第一次训练(预训练)。标注实测点云数据,基于标注数据进行二次下采样网络模型的训练。采集实测点云数据,运用二次训练完成后的模型进行数据的下采样操作,得到下采样完成后的实测点云数据,流程图如下图所示:
源代码程序行数:约11000 行。
3.技术秘密名称:一种基于轻量级神经网络的三维点云关键点提取技术
技术秘密简介:
研发起始时间:研发开始时间为2019年09月15日,完成时间为2019年12月08日。
创新点:①轻量级神经网络 ②关键点提取
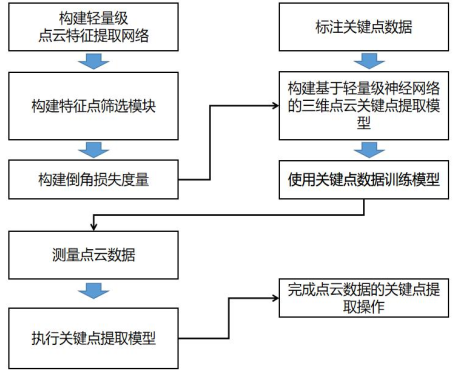
主要功能及作用、步骤:该该专有技术的主要功能为对采集到的点云数据进行关键点提取,作用关键点提取方法能够简化测量点云数据,使用极少的关键点即可表征大规模测量的点云数据点。首先构建轻量级的点云特征提取网络,具体包含三层的采样与聚合层。输出采样后的数据点以及对应的特征。并将输出后的数据点以及特征进行空间与特征维度的翻转,将翻转后的数据点以及特征与标注数据进行倒角损失计算。上述流程完成基于轻量级神经网络的三维点云关键点提取模型的构建与训练。最后基于将实测的点云数据输入进训练完成后的基于轻量级神经网络的三维点云关键点提取模型,即可提取关键点,具体流程图如下所示:
源代码程序行数:约6900 行。
4.技术秘密名称:基于深度贝叶斯与低秩表示的三维抽象特征提取方法
技术秘密简介:
研发起始时间:研发开始时间为2020年06月,完成时间为2020年10月。
创新点:①低秩结构导向的聚类算法 ②深度学习贝叶斯框架
主要功能及作用、步骤:通过将分割问题转化为聚类分析,提出了两种无监督/半监督的聚类算法来解决三维模型的语义分割问题。方法一为低秩结构导向的聚类算法;方法二,结合深度学习贝叶斯框架,将隐含特征的定义转化为数据驱动的参数学习。实现效果:以三维扫描仪获取的点云数据作为输入,通过深度贝叶斯与低秩表示的三维抽象特征提取方法,实现三维模型语义分割。
源代码程序行数:约8500 行。
5.技术秘密名称:一种基于特征保持的点云航空零部件点云滤波方法
技术秘密简介:
研发起始时间:研发开始时间为2020年10月,完成时间为2021年01月。
创新点:①最近迭代算法构建点云局部块 ②基于总变分的法向量范数最小化。
主要功能及作用、步骤:三维点云数据的预处理是利用有效点云信息进行三维重建及障碍物感知的基础,是进行后续点云配准、点云拼接环节的前提。通过建立三维测量点云数据预处理方法,在三维点云数据处理过程中,点云数据离群点、噪声点的剔除以及点云数据的配准不仅是点云数据处理中的重要环节,也是后期对点云数据进行特征提取完成检测环节的基础。实现效果:以三维扫描仪获取的点云数据作为输入,通过基于特征保持的点云滤波算法,得到能有效保留关键特征并且经过有效滤波后的点云数据。
源代码程序行数:约1.2 万行。
6.技术秘密名称:基于大规模场景模型表面的三维点云数据的快速建模系统研究与开发方法
技术秘密简介:
研发起始时间:研发开始时间为2021年01月,完成时间为2021年05月。
创新点:①高斯半球映射的方法 ②改进的 DBSCAN 聚类算法进行聚类
主要功能及作用、步骤:针对大规模点云模型的快速建模系统研究与开发方法,根据一般的拼接算法的缺点和当前点云数据特点提出了基于特征的拼接算法,该方法在每次对应点匹配时依据曲面的局部特征量和点距离的关系,迭代使得点云拼接取得较好的效果。实现效果:以三维扫描仪获取的点云数据的多个片段作为输入,能够得到三维点云数据的快速拼接以及建模的输出点云。
源代码程序行数:约1.3万行。
7.技术秘密名称:一种基于三维测量几何特征提取的局部离群因子算法的特征提取方法
技术秘密简介:
研发起始时间:研发开始时间为2020年10月,完成时间为2021年03月。
创新点:①累积弦长参数化的方法 ②利用箱线图分析,提取位置不连续点
主要功能及作用、步骤:首先对三维点云数据进行几何估算,然后研究几何特性中弦长,单位切向量的角度变化与曲率在三种几何不连续点上的行为变化,再利用离群因子算法提取出弦长与曲率的极值,从而反向识别零阶不连续点和一阶不连续点。实现效果:以三维扫描仪获取的点云数据作为输入,自动计算三维模型的关键集合特征。
源代码程序行数:约1.6万行。
8.技术秘密名称:一种基于点云数据深度学习的图约束特征保持的噪声曲面低秩恢复方法
技术秘密简介:
研发起始时间:研发开始时间为2021年05月,完成时间为2021年09月。
创新点:①对块法矢做旋转不变性变换 ②基于法矢对噪声网格法矢域进行滤波
主要功能及作用、步骤:扫描设备本身精度的限制,外界环境影响以及各种曲面重建算法的误差,得到的三维模型不可避免的有些噪声缺陷。使用基于学习的方法,实现自动化学习和预测。与传统的基于局部数据的降噪方法不同,本算法受到几何统计数据的启发,解决了传统方法需要进行繁琐的调整才能获得满意的结果的问题。实现效果:以三维扫描数据作为输入,自动对网格数据噪声进行过滤,并将迭代结果优化,更新网格顶点的坐标位置。
源代码程序行数:约6800行。
9.技术秘密名称:深层学习网络
技术秘密简介:
研发起始时间:研发开始时间为2015年12月, 完成时间为2017年08月。
创新点:① 高准确率图像识别技术;② 复杂场景下的鲁棒特征提取。
主要功能及作用、步骤:该技术以视觉设备获取的RGB图像数据作为输入, 通过对图像进行编码操作处理来实现特征提取,最终实现复杂场景下特定物体的提取及识别任务。具体地,本技术首先通过 labeling 标注软件对大规模图像数据进行标注,然后通过基于CNN的深度学习模型在生成的数据集上面进行迭代训练,以自动学习大规模复杂场景下的 RGB 图像数据隐式特征,同时利用数据增强技术对CNN深度学习网络的泛化性进行增强,使其适用于不同制造场景下的特征提取及识别任务。最后结合视觉里程计的空间定位功能来实现 bounding box 在三维空间中的位置确定,并通过可视化方法将识别物进行高亮显示。
源代码程序行数:约1.3万行。
10.技术秘密名称:基于Colored Point Cloud配准技术
技术秘密简介:
研发起始时间:研发开始时间为2017年12月,完成时间为2018年08月。
创新点:① 多尺度几何特征提取及描述子计算方法;② 高精度点云配准算法。
主要功能及作用、步骤:该技术以三维扫描仪获取的点云数据作为输入,通过对对尺度几何特征进行提取,同时结合反射率及纹理特征对点云进行操作处理来实现高精度数据配准,以深层高质量的三维数据模型。具体地,基于Colored Point Cloud 配准技术利用结构光相机从多视角下获取物体表面形貌点云数据, 通过几何外形特征匹配找到待匹配点云之间的对应点,根据对应点的位置变换关系。同时,以点云数据反射强度等纹理信息,解算出点云之间的配准变换矩阵, 进而实现点云数据帧两两之间的高精度配准。
源代码程序行数:约1.6万行。
11.技术秘密名称:多维信息融合
技术秘密简介:
研发起始时间:研发开始时间为2016年12月,完成时间为2017年06月。
创新点:①多维传感器数据特征提取;②最佳扫描视场规划。
主要功能及作用、步骤:该技术以三维扫描仪获取的点云数据,相机获取的RGB 图像,以及IMU等传感器作为数据输入,通过对点云数据进行由粗到精的匹配工作来实现点云帧之间的数据配准,最终实现三维重建。具体地,该技术针对三维表面形貌提取角点特征;再对当前帧提取的角点利用光流法实现下一帧的特征进行稳定跟踪;从而通过提取的特征信息得到相邻两帧间的位姿变换。在重建过程中选择满足一定条件的点云帧将做为整个配准过程中的关键帧,针对所选的关键帧进行局部的稀疏集束调整,然后与惯性模块测量所得绝对尺度的位姿进行整合滤波。最后结合融合多传感器数据对复杂三维形貌表面进行快速三维稠密重建。
源代码程序行数:约1.6万行。
技术秘密所有权:南京航空航天大学
发明人:汪俊
受让方:南京耘瞳科技有限公司
转让/许可方式:转让
拟交易价格及价格形成过程:因受让方为发明人利益关联单位(持股),经第三方评估,交易价格拟定为62.71万元。